猪平研究室
国立大学法人 九州工業大学
更新 Last updated: 2025.4.1
- 新年度に伴う更新(2025.4.1)
- 修了・卒業に伴う更新(2025.3.26)
連絡先
- 〒804-8550 福岡県北九州市戸畑区仙水町1-1
- Phone: 050-1739-2095(直通)
- E-mail: inohira.eiichi402 (at) mail.kyutech.jp
- 九州工業大学 大学院工学研究院 基礎科学研究系 講師 猪平栄一
メンバ
教員
- 講師 猪平 栄一
学生(2025年度)
- 工学府工学専攻 博士前期課程 2年 後藤 佑介
- 工学府工学専攻 博士前期課程 2年 菅谷 尚樹
修了生・卒業生
2025年3月修了・卒業
- 工学府工学専攻 博士前期課程 渡部 早弥
- 工学部機械知能工学科 迫 さくら
- 工学部機械知能工学科 村崎 天真
2024年3月修了・卒業
- 工学府工学専攻 博士前期課程 實安 慶祐
- 工学府工学専攻 博士前期課程 武井 優介
- 工学部機械知能工学科 後藤 佑介(工学府工学専攻に進学)
- 工学部機械知能工学科 菅谷 尚樹(工学府工学専攻に進学)
2023年3月修了・卒業
- 工学府工学専攻 博士前期課程 鹿子嶋 剛
- 工学府工学専攻 博士前期課程 樋口 知宏
- 工学部機械知能工学科 小野 創志郎
- 工学部機械知能工学科 渡部 早弥(工学府工学専攻に進学)
2022年3月卒業
- 工学部機械知能工学科 實安 慶祐(工学府工学専攻に進学)
- 工学部機械知能工学科 武井 優介(工学府工学専攻に進学)
2021年3月修了・卒業
- 工学府工学専攻 博士前期課程 東 亮太
- 工学部総合システム工学科 兒玉 一真
- 工学部総合システム工学科 鹿子嶋 剛(工学府工学専攻に進学)
- 工学部総合システム工学科 樋口 知宏(工学府工学専攻に進学)
2020年3月卒業
- 工学部総合システム工学科 田中 大揮
2019年3月卒業
- 工学部総合システム工学科 太田 浩介
- 工学部総合システム工学科 東 亮太(工学府工学専攻に進学)
2018年3月修了
- 人間知能システム工学専攻 博士前期課程 朝比奈 涼
- 人間知能システム工学専攻 博士前期課程 齊藤 明王
2017年3月修了
- 人間知能システム工学専攻 博士前期課程 阿部 佑太
- 人間知能システム工学専攻 博士前期課程 柏尾 洋平
- 人間知能システム工学専攻 博士前期課程 玉木 陽介
2016年3月修了
- 脳情報専攻 博士前期課程 成富 敦
2015年3月修了
- 脳情報専攻 博士前期課程 木村 祐太
- 脳情報専攻 博士前期課程 杉田 大地
- 脳情報専攻 博士前期課程 土本 有哉
2014年3月修了
- 生体機能専攻 博士前期課程 末松 崇志
- 生体機能専攻 博士前期課程 西村 卓
- 生体機能専攻 博士前期課程 古川 和正
2013年3月修了・卒業
- 生体機能専攻 博士前期課程 楊 駿臣
- 生体機能専攻 博士前期課程 工藤 英明
- 生体機能専攻 博士前期課程 白石 和博
- 生体機能専攻 博士前期課程 高宗 恭平
- 生体機能専攻 博士前期課程 吹上 哲也
- 工学部電気電子工学科 片渕 祐輔
2012年3月修了・卒業
- 生体機能専攻 博士後期課程 魚井 孝則
- 工学部機械知能工学科 脇田 健一
- 工学部電気電子工学科 西村 卓(生体機能専攻に進学)
- 工学部電気電子工学科 松本 諒一
2011年3月修了・卒業
- 生体機能専攻 博士前期課程 原田 充崇
- 工学部電気工学科 奥田 祐大
教員
猪平 栄一
| 所属 | 九州工業大学 大学院工学研究院 基礎科学研究系 |
| 職位 | 講師 |
学歴
| 1998年3月 | 東北大学工学部機械航空工学科卒業 |
| 2003年3月 | 同大学大学院工学研究科航空宇宙工学専攻博士課程後期3年の課程単位 取得満期退学 |
| 2003年12月 | 博士(工学)(東北大学)取得 |
職歴
| 2003年4月 | 九州工業大学大学院生命体工学研究科生体機能専攻助手 |
| 2007年4月 | 同助教 |
| 2008年4月 | 同講師 |
| 2013年4月 | 同研究科脳情報専攻講師 |
| 2014年4月 | 同研究科人間知能システム工学専攻講師 |
| 2018年4月 | 同大学大学院工学研究院基礎科学研究系講師 |
担当大学院・学部
- 大学院工学府工学専攻
- 工学部
所属学会
- 日本ロボット学会
- 日本知能情報ファジィ学会
- バイオ・メディカル・ファジィシステム学会
- IEEE
- 電子情報通信学会
現在取り組んでいる研究
- サービスロボットのためのソフトウェアフレームワークに関する研究
- サービスロボットのためのソフトウェアプラットフォームに関する研究
過去の研究
リアルタイムモーションシミュレーションを用いた両腕協調動作生成システムの評価
科学研究費補助金 若手研究(B) 課題番号24700596 (平成24年度~平成25年度)
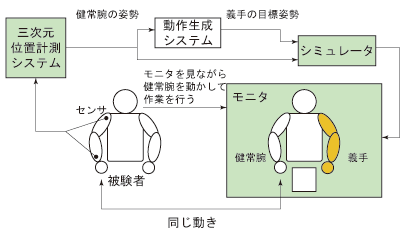
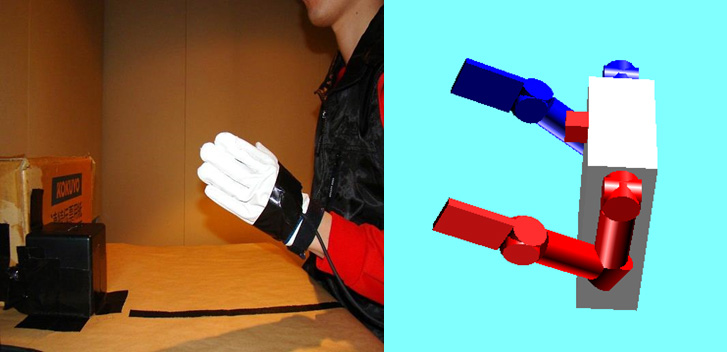
これまで健常腕の動作に合わせて筋電義手を自動的に動かすための両腕協調動作生成システムについて研究していました。 従来の研究では、あらかじめ健常腕の動作を計測し、 そのデータを用いて両腕協調動作生成システムの学習や評価を行ってきました。 しかし、健常腕は使用者によって任意に動かすことができ、 また常に両手を協調させて動かしたいと思っているわけではありません。 この問題に対処するためには、健常腕の動作に合わせて筋電義手を実際に動かすシステムか、 それを模擬するシミュレータのいずれのシステムを必要になります。 本研究では、被験者の体格などに合わせて設定を容易に変更できるシミュレータを構築して、 両腕協調動作生成システムの検証を行います。
上図のように、被験者の健常腕の姿勢をリアルタイムに計測し、 そのデータを用いて力学的シミュレーションを行い、両手の姿勢をコンピュータグラフィクスとして表示します。 現在のところ、下図のように健常腕にセンサを取り付けて、リアルタイムシミュレーションを行い、 その結果をモニタに表示することが実現できています。